Harry Haoyang Li
Hi there! I'm a roboticist and researcher at UC San Diego. I'm grateful to collaborate with Prof. Leonidas J. Guibas. I was previously advised by Prof. Hao Su.

Build
I help teams developing frontier World Models bring them into robotics, from infrastructure to action policies. I care about turning research into real systems.
Research
I study how robots and multimodal agents understand, predict, and act in the physical world. I want to help build general physical intelligence and an AI-driven physical economy.
I am on the job market; shoot me an email if there is a good fit.
PhysMem: Scaling Test-Time Memory for Embodied Physical Reasoning
Haoyang Li, Yang You, Hao Su, Leonidas Guibas
arXiv, 2026
Oral @ CVPR Workshop on Interactive Physical AI (IPA)
ICLR 2026 Workshop on Lifelong Agents: Learning, Aligning, Evolving
TL;DR Scales test-time memory so multimodal agents can retain physical context for stronger embodied reasoning.
Webpage •
PDF •
Code •
Thread
VISTA: Scaling World Model for Hierarchical Manipulation Policies
EMU 3.5 Team, Haoyang Li
arXiv, 2026
TL;DR Scales world models to support hierarchical manipulation policies, linking long-horizon planning with low-level control.
Webpage •
PDF •
Code •
Model
Diffusion Dynamics Models with Generative State Estimation for Cloth Manipulation
Tongxuan Tian*, Haoyang Li*, Bo Ai, show more
Conference on Robot Learning (CoRL), 2025
Oral @ CoRL workshop on Learning to Simulate Robot
Worlds
RSS 2025 Structured World Models for Robotic Manipulation
TL;DR Combines diffusion dynamics, generative state estimation, and 10x GNNs to model deformable cloth for more reliable manipulation.
Webpage •
PDF •
Code
Hillbot Alpha: A Sim-to-Real Breakthrough in Mobile Manipulation Robotics
Hillbot Team
Hillbot Alpha Demo, 2024
Embodied AI brains and foundational models in the world @ #CES2025
TL;DR Translates simulation-trained mobile manipulation into hardware, showing a practical path from embodied training to real-world robot operation.
Video

OpenReal2Sim: A Toolbox for Real-to-Sim Reconstruction and Robotic Simulation
OpenReal2Sim Team
GitHub, 2025
TL;DR Turns real scenes into simulation-ready robot environments, reducing the setup gap for deployment-focused testing and iteration.
Code
Portable Venipuncture Robot for Autonomous Vascular Access
Haoyang Li*, Tenghui Xie*, Jinhai Pan, show more
ASME Student Mechanism and Robot Design Competition, 2022
Best Robotic System Finalist
TL;DR Integrates compact hardware and vision-guided vascular access, targeting autonomous clinical robotics beyond controlled lab settings.
Webpage •
PDF •
2021
MIT Technology Review

Security Multimodal Agent (AEGIS)
2025
Google ADK Hackathon
Intelligent security system transforming passive surveillance into a responsive, conversational guardian using LLMs and real-time vision.
Related Direction: CCTV Agent.
Code •
Youtube
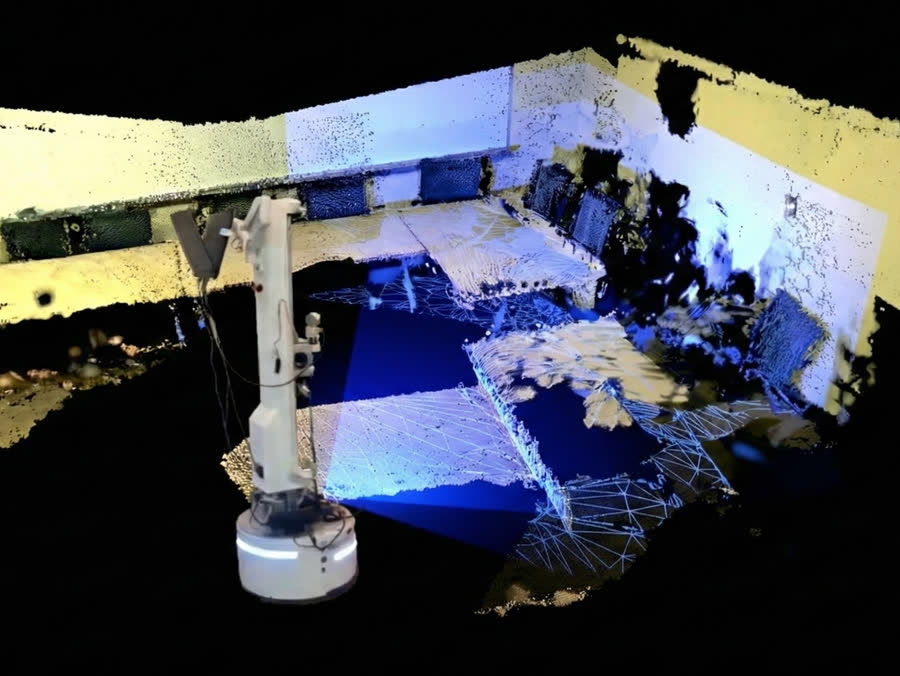
3DGS Active Exploration Agent
2024
Autonomous robot system navigating unknown indoor environments with LiDAR/RGB-D to reconstruct high-fidelity 3D scenes via Gaussian Splatting.
Related Direction: World Labs (Autonomous 3D generation).
Code

Home Cleaning Mobile Manipulation
2024
Mobile manipulation platform integrating a collaborative arm with a mobile base for household tasks like tidying toys.
Follow-ups: Related products from Roborock Saros Z70.
Youtube
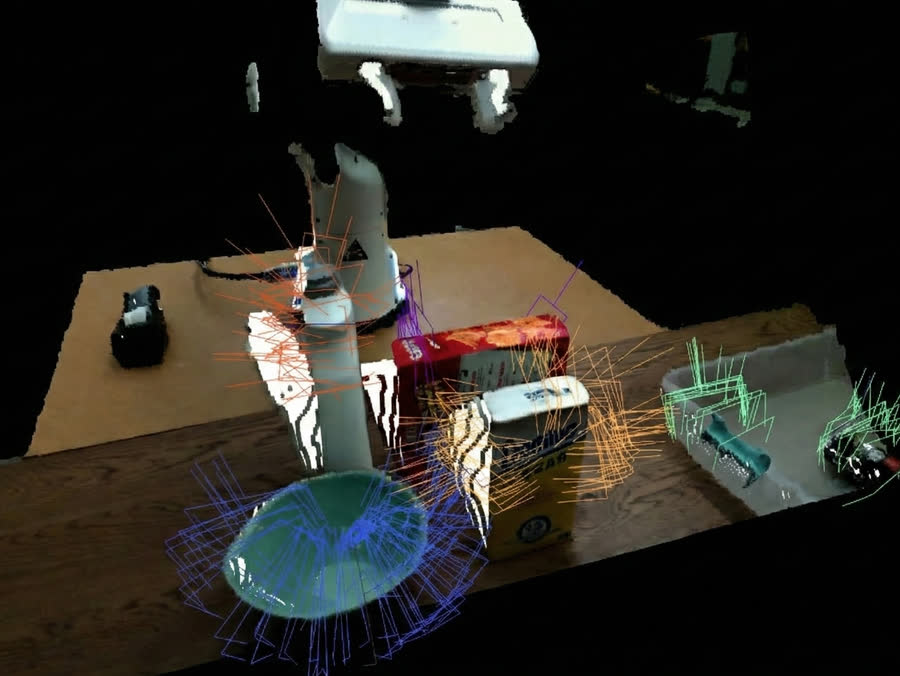
Antipodal Grasp Generation
2023
Collision-free grasp generator analyzing 3D object meshes to propose viable Franka end-effector poses for RL priors and hardware co-design.
Code

RoboMaster
2020
Lead mechanical design for the dart launcher system in the RoboMaster University Series global competition.

To see the spectrum, to voice the silence.